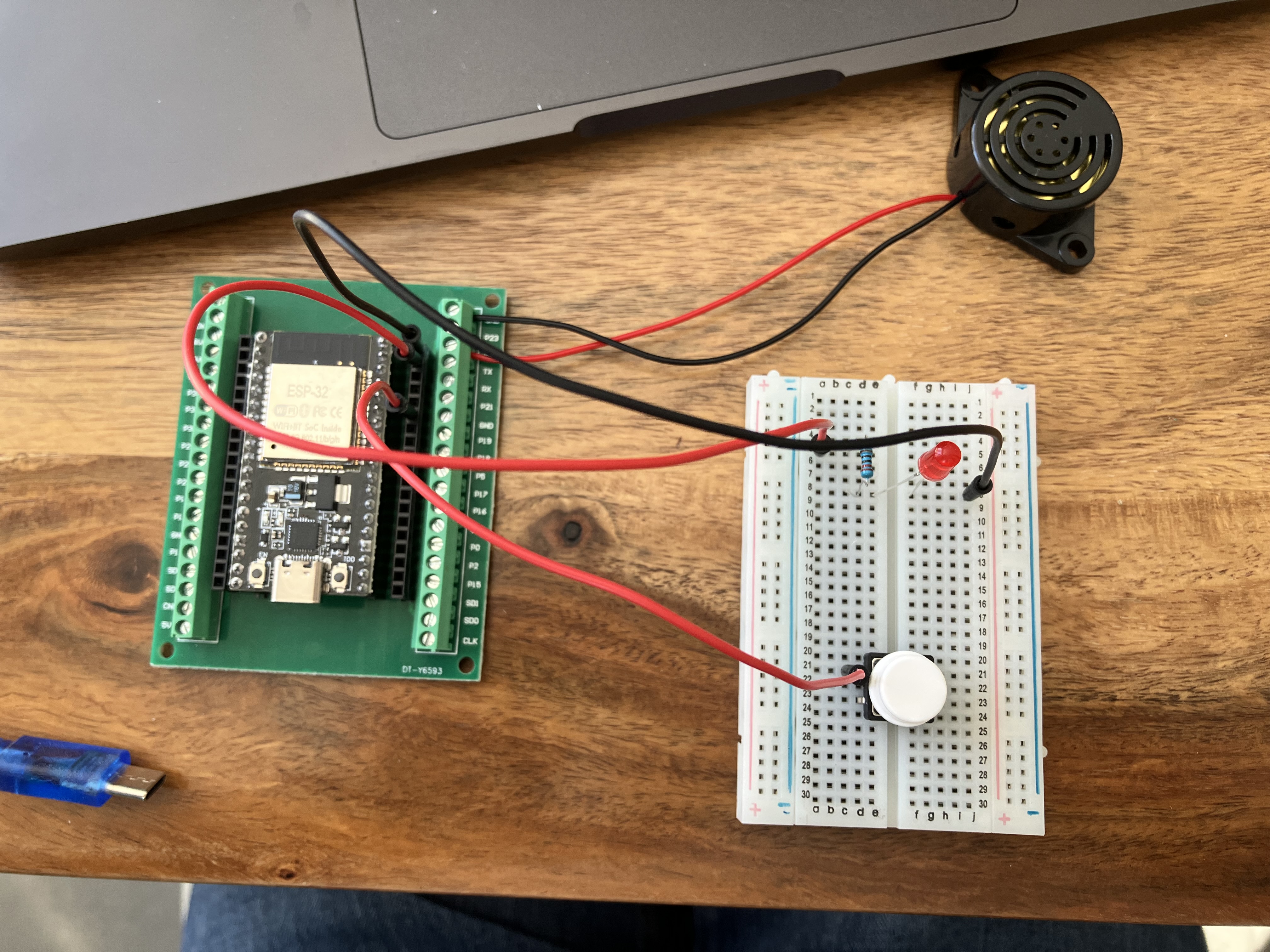
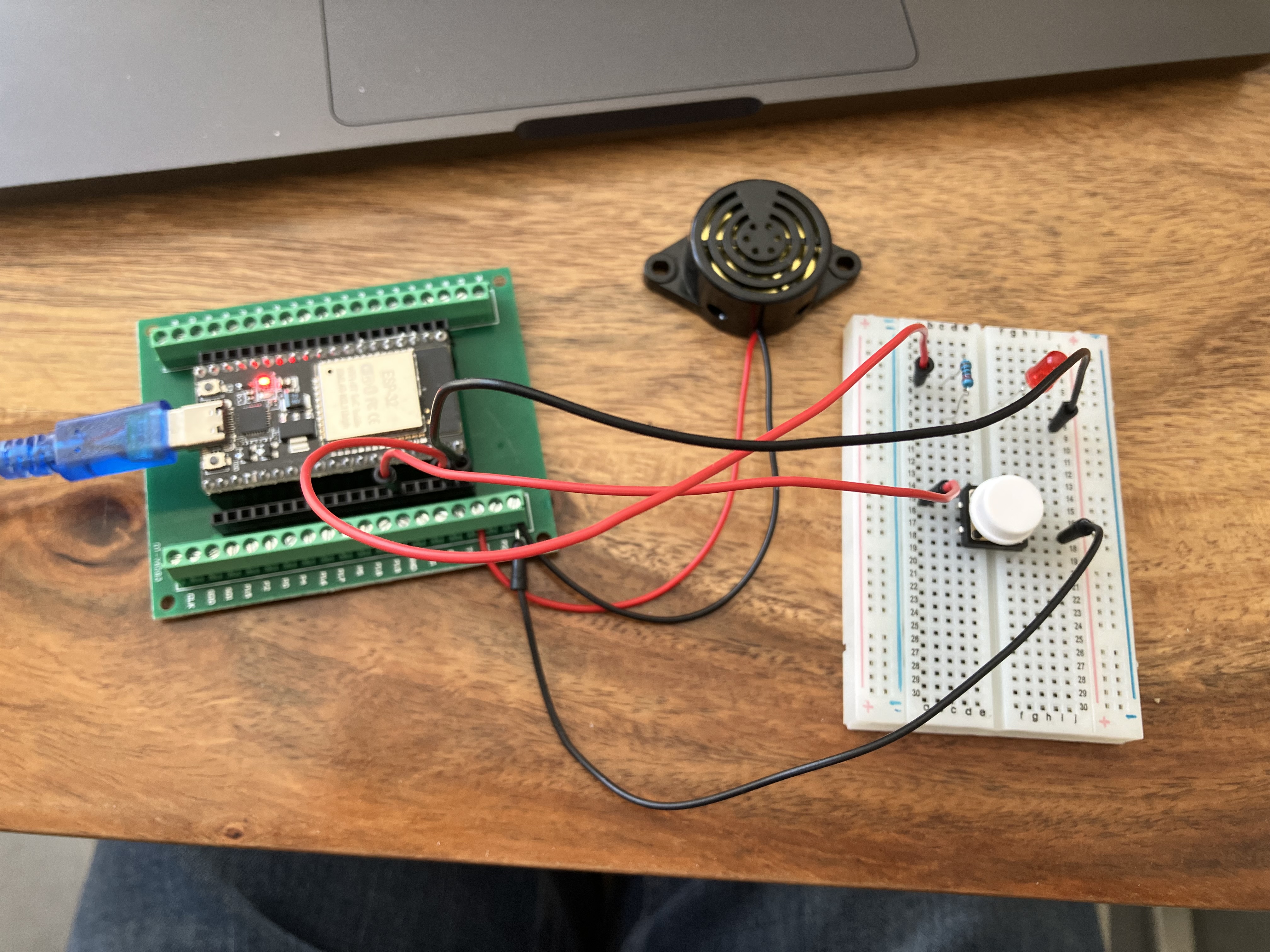
Le bouton rejoint le circuit — LED, buzzer et bouton ensemble
La phase 1 était unidirectionnelle : l'ESP32 envoyait des commandes. Maintenant, il doit écouter. Un bouton poussoir, c'est le capteur le plus simple — il dit ON ou OFF. Mais transformer ce signal brut en interaction fiable, c'est plus subtil qu'on pense.
Premier circuit avec un input : le bouton sur GPIO 21
avec INPUT_PULLUP.
Ce que j'ai appris :
digitalRead() retourne HIGH (1) ou LOW (0)
Le problème : si on fait if (bouton == LOW) { toggle LED },
ça toggle des centaines de fois par seconde tant qu'on tient le bouton.
La loop tourne trop vite !
La solution — détection de front descendant :
On compare l'état actuel avec l'état précédent. On ne réagit qu'au MOMENT où le bouton passe de HIGH à LOW.
bool appui = (etatActuel == LOW && etatPrecedent == HIGH);Le deuxième piège — le rebond (bounce) :
Un bouton physique ne fait pas un contact propre. Quand on appuie, le signal "rebondit" entre HIGH et LOW pendant quelques millisecondes. Solution : ignorer tout changement pendant 50ms après un appui.
if (millis() - dernierChangement < 50) return;Combinaison de la machine à états (phase 1) avec le bouton (phase 2). Chaque appui passe au mode suivant :
Le grand changement — millis() au lieu de delay() :
delay() bloque tout. Impossible de lire le bouton pendant un delay(500).
millis() résout tout : on regarde l'heure au lieu de fermer les yeux.
// delay() = fermer les yeux et compter
delay(500);
// millis() = regarder sa montre
if (millis() - dernierTick >= 500) {
dernierTick = millis();
// faire quelque chose
}Le crash LEDC : Premier crash sérieux !
"Guru Meditation Error: Interrupt wdt timeout on CPU1".
La cause : mélanger analogWrite() et digitalWrite()
sur le même pin crée un conflit dans le périphérique LEDC de l'ESP32.
La règle : Sur ESP32, choisir UN mode par pin — soit
analogWrite(), soit digitalWrite(). Ne jamais mélanger.
Le jeu de mémoire classique, adapté pour un seul bouton + buzzer + LED.
Comment ça marche :
Machine à états avec branches :
Ce que j'ai appris :
random() et randomSeed() — générer du hasardint sequence[20] pour stocker la séquence| Concept | Exercice | Application robot soccer |
|---|---|---|
digitalRead / INPUT_PULLUP |
2.1 | Lire des capteurs binaires |
| Détection de front / debounce | 2.2 | Réagir aux changements de capteurs |
| millis() non-bloquant | 2.3 | Multitâche (capteurs + moteurs) |
| Tableaux / random / timeout | 2.4 | Trajectoires, imprévisibilité |
Temps total : ~2 heures
Difficulté : Moyenne (le debounce et millis() demandent de la réflexion)
Bug mémorable : Le crash LEDC — ne jamais mélanger analogWrite et digitalWrite sur ESP32 !
digitalRead debounce millis() analogWrite random tableaux